42 他山之石:etcd架构之美
你好,我是郑建勋。
这节课,我们来聊一聊我们将在分布式项目中使用的重要中间件:etcd。
etcd这个名字是 etc distributed 的缩写。我们知道,在Linux中etc目录存储了系统的配置文件,所以etcd代表了分布式的配置中心系统。然而,它能够实现的功能远不是同步配置文件这么简单。etcd可以作为分布式协调的组件帮助我们实现分布式系统。
使用etcd的重要项目包括了CoreOS与Kubernetes。etcd使用 Go 书写,底层使用了 Raft 协议,它的架构本身非常优美。这节课就让我们来看一看etcd的架构、核心特性和实现机制,这样我们才能利用etcd更好地完成分布式协调工作,领会这个优秀的开源组件的设计哲学。同时,掌握etcd也有助于我们更深入地了解Kubernetes的运行机制。
etcd全局架构
etcd的第一个版本 v0.1 于2013年发布,现在已经更新到了v3,在这个过程中,etcd 的稳定性、扩展性、性能都在不断提升。我们这节课主要讨论的是当前最新的v3版本。话不多说,我们先来从整体上看一看etcd的架构。
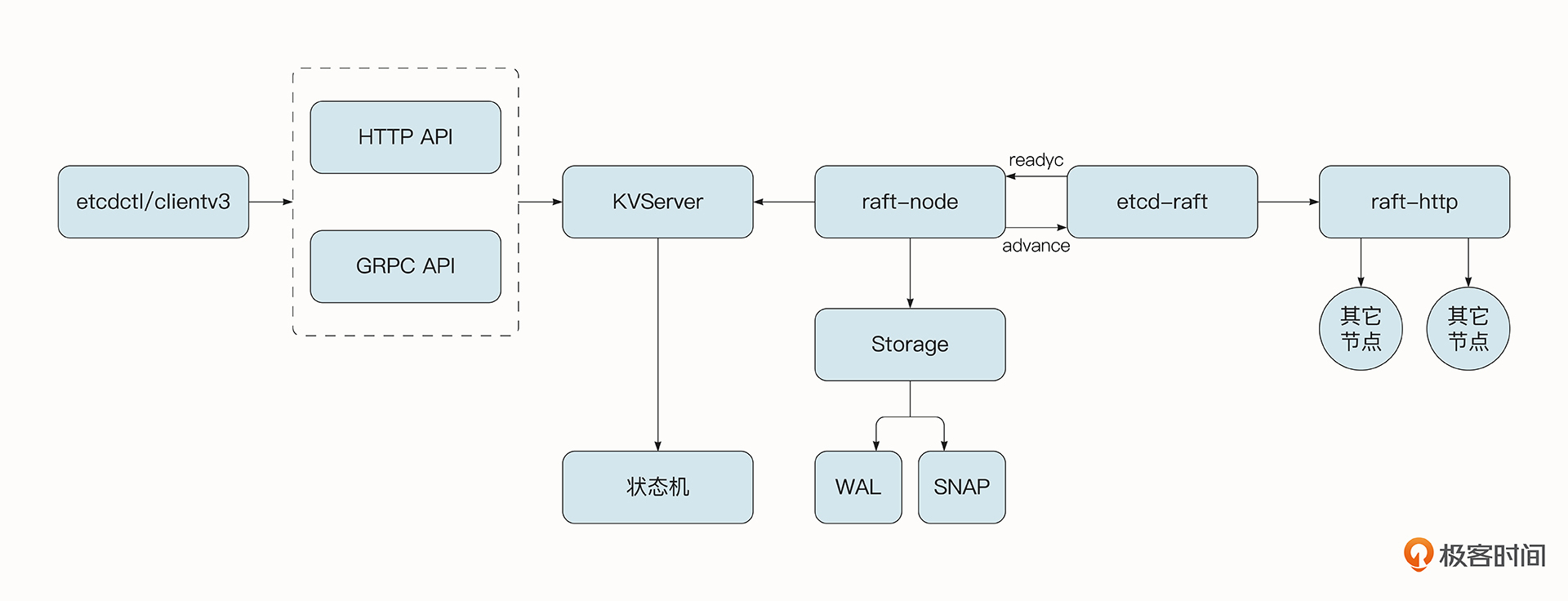
etcd从大的方面可以分为几个部分,让我们结合图片从右往左说起。
首先etcd抽象出了raft-http模块,由于etcd通常为分布式集群部署方式,该层用于处理和其他etcd节点的网络通信。etcd内部使用了HTTP协议来进行通信,由于etcd中的消息类型很多,心跳探活的数据量较小,快照信息较大(可达GB级别),所以etcd有两种处理消息的通道,分别是Pipeline消息通道与Stream消息通道。
Stream消息通道是etcd中节点与节点之间维护的长连接,它可以处理频繁的小消息,还能复用HTTP底层的连接,不必每次都建立新的连接。而Pipeline消息通道用于处理快照这样数据量大的信息,处理完毕后连接会关闭。
再往左是etcd-raft模块,它是etcd的核心。该层实现了Raft协议,可以完成节点状态的转移、节点的选举、数据处理等重要功能,确保分布式系统的一致性与故障容错性。之前我们也介绍过,Raft中的节点有3种状态,分别是Leader(领导者),Candidates(候选人)和 Follower(跟随者)。在此基础上,etcd 为 Raft 节点新增了一个PreCandidate(预候选人)。
我们在讲解Raft协议时介绍过,如果节点收不到来自Leader的心跳检测,就会变为Candidates开始新的选举。如果当前节点位于不足半数的网络分区中,短期内不会影响集群的使用,但是当前节点在不断发起选举的过程中,当前选举周期的Term号会不断增长,当网络分区消失后,由于该节点的Term号高于当前集群中Leader节点的Term号,Raft协议就会迫使当前的Leader切换状态并开始新一轮的选举。
但是,这种选举是没有意义的。为了解决这样的问题,etcd在选举之前会有一个新的阶段叫做PreVote,当前节点会先尝试连接集群中的其他节点,如果能够成功连接到半数以上的节点,才开始新一轮的选举。

在etcd-raft模块基础之上还封装出了raft-node模块。这个模块主要是上层模块和下层Raft模块沟通的桥梁,它同时还有一个重要任务,就是调用storage模块,将记录(Record)存储到WAL日志文件中落盘。WAL日志文件可以存储多种类型的记录,包括下面几种。
- WAL文件的元数据,记录节点 ID、集群 ID 信息。
- Entry记录,即客户端发送给服务器处理的数据。
- 集群的状态信息,包含集群的任期号、节点投票信息。
- 数据校验信息,它可以校验文件数据的完整性与正确性。
- 快照信息,包含快照的相关信息,但不包含实际的快照数据。它可以校验快照数据的完整性。
type Record struct {
Type int64 `protobuf:"varint,1,opt,name=type" json:"type"`
Crc uint32 `protobuf:"varint,2,opt,name=crc" json:"crc"`
Data []byte `protobuf:"bytes,3,opt,name=data" json:"data,omitempty"`
}
WAL日志文件非常重要,它能保证我们的消息在大部分节点达成一致且应用到状态机之前,让记录持久化。这样,在节点崩溃并重启后,就能够从WAL中恢复数据了。
WAL日志的数量与大小随着时间不断增加,可能超过可容纳的磁盘容量。同时,在节点宕机后,如果要恢复数据就必须从头到尾读取全部的WAL日志文件,耗时也会非常久。为了解决这一问题,etcd会定期地创建快照并保存到文件中,在恢复节点时会先加载快照数据,并从快照所在的位置之后读取WAL文件,这就加快了节点的恢复速度。快照的数据也有单独的snap模块进行管理。
在raft-node模块之上是etcd-server模块,它最核心的任务是执行Entry对应的操作,在这个过程中包含了限流操作与权限控制的能力。所有操作的集合最终会使状态机到达最新的状态。etcd-server同时还会维护当前etcd集群的状态信息,并提供了线性读的能力。
etcd-server提供了一些供外部访问的GRPC API接口,同时etcd也使用了 GRPC-gateway 作为反向代理,使服务器也有能力对外提供HTTP协议。
最后,etcd还提供了客户端工具etcdctl和clientv3代码库,使用GRPC协议与etcd服务器交互。客户端支持负载均衡、节点间故障自动转移等机制,极大降低了业务使用 etcd 的难度,提升了开发的效率。
此外,etcd框架中还有一些辅助的功能,例如权限管理、限流管理、重试、GRPC拦截器等。由于不是核心点,图中并没有一一列举出来。
etcd架构的优点
etcd自身的架构与实现有许多值得借鉴的地方。例如它的高内聚、低耦合、高性能,还有它优雅的数据同步。
- 高内聚
从etcd整体的架构图上可以看出,etcd将相关的核心功能(例如鉴权、网络、Raft协议)都聚合起来形成了一个单独的模块。功能之间联系紧密,并且只提供核心的接口与外部进行交互。这非常便于理解与开发,也便于后期对功能进行组合。
- 低耦合
各个模块之间边界清晰,用接口来进行交流与组合的设计给了程序极大的扩展性。举一个例子,数据存储的store就是一个interface。
type Storage interface {
InitialState() (pb.HardState, pb.ConfState, error)
Entries(lo, hi, maxSize uint64) ([]pb.Entry, error)
Term(i uint64) (uint64, error)
LastIndex() (uint64, error)
FirstIndex() (uint64, error)
Snapshot() (pb.Snapshot, error)
}
简单地搜索一下,可以发现etcd内部使用了大量接口。
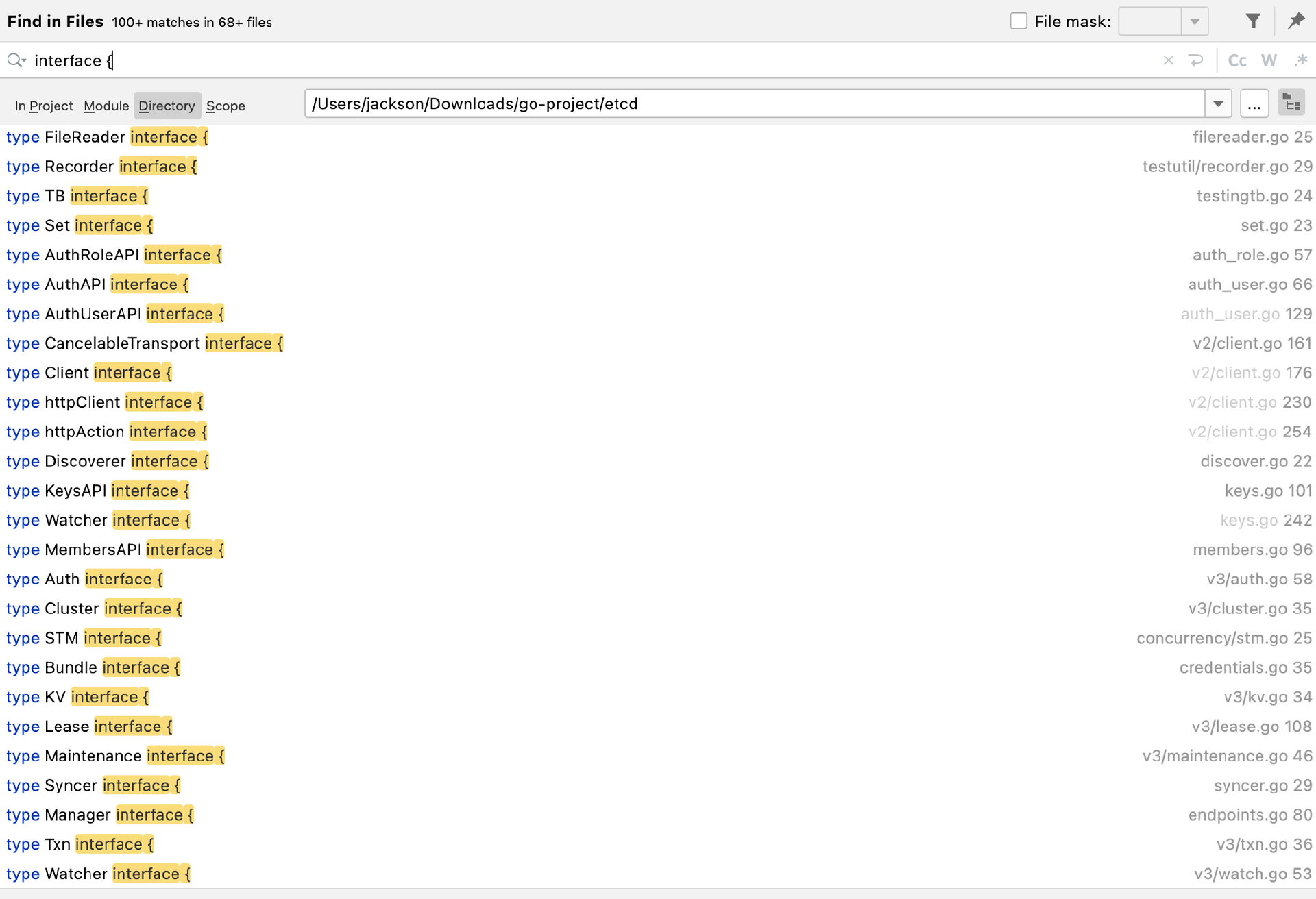
这样做的好处是,etcd抽象出了etcd-raft这个模块,实现了Raft协议,开发者可以在这个模块之上构建实现了Raft协议的分布式系统,这就减轻了开发者的心理和技术负担。因为分布式协议是非常难实现的,它潜在的问题也很难被发现,发现问题之后又很难定位原因,有了etcd-raft模块,这一系列问题都迎刃而解了。
在etcd代码库中有一个示例代码,该示例代码基于etcd-raft模块实现了一个最简单的分布式内存KV数据库。在示例代码中实现了上游的KVServer服务器与raft-node节点,并与etcd-raft模块进行交互,去掉了etcd实现的日志落盘等逻辑,将键值对存储到了内存中。如果你有志于深入地学习etcd,从这个实例入手是非常不错的选择。
- 优雅的数据同步
在etcd中,我们极少看到使用互斥锁的场景。更多的时候,它是借助协程与通道的相互配合来传递信息的,这就既完成了通信又优雅地解决了并发安全问题。
- 更快的读取性能
etcd在etcd-raft模块中实现了Raft协议。我们知道Raft并不能够保证读取的线性一致性,也就是说,它有可能读取到过时的数据。
怎么解决呢?办法有很多。例如,Follower可以将读请求直接转发给Leader,不过这样的话Leader的压力会很大,并且Leader可能已经不是最新的Leader了。
第二种解决方案是etcdv3.2之前的处理方式。也就是将该请求记录为一个Entry,从而借助Raft机制来保证读到的数据是最新的。
还有一种更轻量级的方法。在v3.2之后,etcd实现了ReadIndex机制,这也是在Raft论文当中提到过的。Follower向Leader读取当前最新的Commit Index,同时Leader需要确保自己没有被未知的新Leader取代。它会发出新一轮的心跳,并等待集群中大多数节点的确认。一旦收到确认信息,Leader就知道在发送心跳信息的那一刻,不可能存在更新的Leader了。也就是说,在那一刻,ReadIndex是集群中所有节点见过的最大的Commit Index。Follower会在自己的状态机上将日志至少执行到该Commit Index之后,然后查询当前状态机生成的结果,并返回结果给客户端。
- 可靠的Watch机制与高性能的并发处理
相对于etcdv2,etcdv3版本将所有键值对的历史版本都存储了起来,这就让Watch机制的可靠性更高了,它实现的MVCC机制也提高了系统处理并发请求的数量。
总结
etcd是用Go语言编写的分布式键值存储系统,它的应用广泛而且架构优美。etcd拥有高内聚和低耦合的特点,它的内部分为了清晰的etcd-raft模块、etcd-http模块,etcd-node模块、etcd-server模块等。并且,模块之间可以用清晰的接口进行交流,这就保证了系统的扩展性与可组合性,我们可以在etcd-raft模块的基础上快速构建起自己的分布式系统。
etcd实现了Raft协议,并且在此基础上实现了PreVote机制与线性读机制,再加上WAL日志文件的落盘与快照,最大程度保证了服务的一致性与出现故障时的容错性。
etcd中的代码实践了CSP的编程模式,大量使用了协程与通道的机制来进行通信,对超时的处理、资源的释放、并发的处理都比较优雅,是我们学习Raft协议和Go语言程序设计比较好的资料。
课后题
学完这节课,还是照例给你留一道思考题。
和MySQL一样,etcd也使用了MVCC的机制,请你查阅资料,说明什么是MVCC,他能解决什么复杂的问题?
欢迎你在留言区与我交流讨论,我们下节课见。
- Realm 👍(4) 💬(0)
思考题: 1. MVCC(Multi-Version Concurrency Control),即多版本并发控制。MVCC 是一种并发控制的方法,可以实现对数据库的并发访问。 2. MySQL的MVCC工作在RC(读提交)和RR(重复读)的隔离级别。 表的行记录逻辑上是一个链表,既保留业务数据本身,还有两个隐藏字段: - trx_id(最近修改的事务ID) - roll_ptr(指向上一个版本数据的指针,通过undo log可以实现从高版本到低版本的迁跃) 3. ETCD的MVCC同样可以维护一个数据(key对应的值)的多个历史版本,且使得读写操作没有冲突,不使用锁,增加系统吞吐。 4. 窥探etcd对同一个key进行修改,内部版本的变化 ``` > docker exec etcd-gcr-v3.5.5 /bin/sh -c "/usr/local/bin/etcdctl put a 1 " OK > docker exec etcd-gcr-v3.5.5 /bin/sh -c "/usr/local/bin/etcdctl get a -w=json" {"header":{"cluster_id":18011104697467366872,"member_id":6460912315094810421,"revision":22,"raft_term":3},"kvs":[{"key":"YQ==","create_revision":22,"mod_revision":22,"version":1,"value":"MQ=="}],"count":1} > docker exec etcd-gcr-v3.5.5 /bin/sh -c "/usr/local/bin/etcdctl put a 2 " OK > docker exec etcd-gcr-v3.5.5 /bin/sh -c "/usr/local/bin/etcdctl get a -w=json" {"header":{"cluster_id":18011104697467366872,"member_id":6460912315094810421,"revision":23,"raft_term":3},"kvs":[{"key":"YQ==","create_revision":22,"mod_revision":23,"version":2,"value":"Mg=="}],"count":1} > docker exec etcd-gcr-v3.5.5 /bin/sh -c "/usr/local/bin/etcdctl put a 3 " OK > docker exec etcd-gcr-v3.5.5 /bin/sh -c "/usr/local/bin/etcdctl get a -w=json" {"header":{"cluster_id":18011104697467366872,"member_id":6460912315094810421,"revision":24,"raft_term":3},"kvs":[{"key":"YQ==","create_revision":22,"mod_revision":24,"version":3,"value":"Mw=="}],"count":1} ```
2023-01-14