27 机器人+大模型会产生什么化学反应?
你好,我是独行。
这节课我们来讲讲机器人,机器人的种类有很多,ChatGPT也算是一种机器人,就是聊天机器人嘛,还有像客服机器人,甚至扫地机器人、喷漆机器人等等。不过我们这里特指人形机器人。机器人进化和人类进化很类似:首先,机器人要能站稳,能走直线,不会摔倒——对应到人脑,就是小脑部分要解决的问题;后来慢慢发展出了语音识别、图像识别,这时已经对应到了大脑中的某个特定区域;到现在大模型出来之后,相当于进化到了前额叶的部分,AI也开始能具备一些“基本智力”。
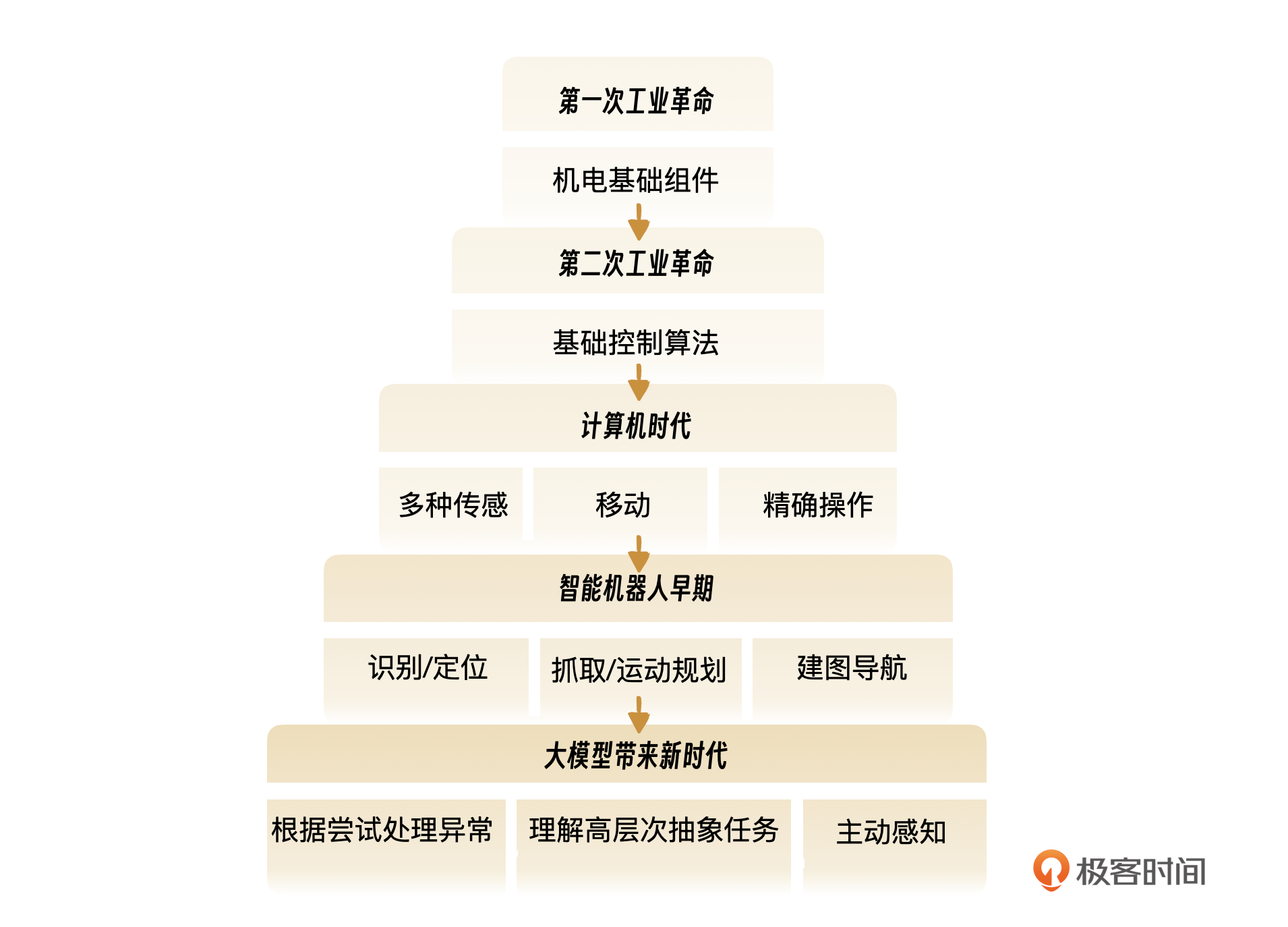
有人说,机械的进步=控制力的进步,比如第一次工业革命,诞生了气缸这样的基础组件;到第二次工业革命,有了基础控制和自动化,人类开始能够通过机械操控机械;到计算机革命时代,有了PLC(可编程控制器),开始用电脑控制机械,再后来,我们用3D视觉AI控制机械,到现在用大模型控制机械。
每代之间不是替代关系,而是补充关系,不是说有了计算机,机械控制就没用了,而是通过计算机给机械控制赋能,让机械有了更强的能力,由此诞生出了更多的产品形态,有了大模型,可以逐渐替换以前由人来控制的场景。
机器人行业的困境
首先,传统AI并不智能,训练成本高,泛化能力弱,除了在机器人视觉领域,严格意义上应该是计算机视觉(CV)领域,有较多应用之外,在机器人这样动作连续且复杂、有较多物理交互和操作因果性的领域落地情况并不多。
其次,目前的机器人很多时候只能被当作一种可编程的设备,基本只能完成特定场景下的特定工作,在人类社会的渗透率仍然很低。以使用最广泛、渗透率最高的工业机器人为例,2022年中国一共销售约30万台机器人,总体保有量在150万到200万台之间。而中国的制造业产业工人约有一亿人,通常情况下一台机器人代替0.5~2个人,取平均数1的话,工业机器人的总体渗透率在2%左右,这意味着绝大部分工厂里的生产工作仍然由人工完成。
此外,现有的机器人应用软件还不能充分发挥机器人现有机能。虽然目前机器人硬件性能距离“终结者”仍然有巨大的差距,但是整体硬件机能已经达到了很不错的可用水平。机器人是典型的机电软一体化产品,软件与硬件是相互限制又相互促进的矛盾体。机器人机能提升可以带来更好的性能,更好的性能支持更强大的软件,更强大的软件支持更多应用,更多应用扩大市场促使机器人厂商研发机能更强大的机器人,由此机器人产业才会步入良性的发展循环。
最后,价格昂贵。像人形机器人,价格起码两位数+万起。
总结起来就是:不智能、功能单一、应用软件能力有限、价格贵。实际上我认为前三个问题归根结底就一个问题:软件智能化问题,软件智能化根源在智能,也就是我们今天要谈的核心,大模型最大的突破就是比之前的模型更智能,那么能不能把大模型的能力嫁接到机器人上呢?答案是肯定的。
大模型如何赋能机器人?
我们先来看下机器人的工作流程。首先需要告诉机器人要做的任务是什么,机器人就会理解需要做的事情,然后拆分任务动作,生成应用层控制指令,并根据任务过程反馈修正动作,最终完成人类交给它的任务。整个过程不需要或者仅需少量人类的介入和确认,基本实现了机器人自主化运行。举一个例子,我们给机器人一个任务:去接一杯水,它会分解成4个动作。
- 任务定义与描述:去接一杯水。
- 任务分解为动作:把从拿杯子到打开水龙头到接水的过程拆分成一个一个细小的动作。
- 根据分解动作对机器人进行编程,生成代码:可以是C++、Python,也可以是自定义的机器人编程语言。
- 控制-执行-反馈,这是传统机器人控制的主要功能。
在大模型之前,只有第4步是由计算机完成的,前三步都是由工程师完成,那么现在前3步似乎也成为可能。
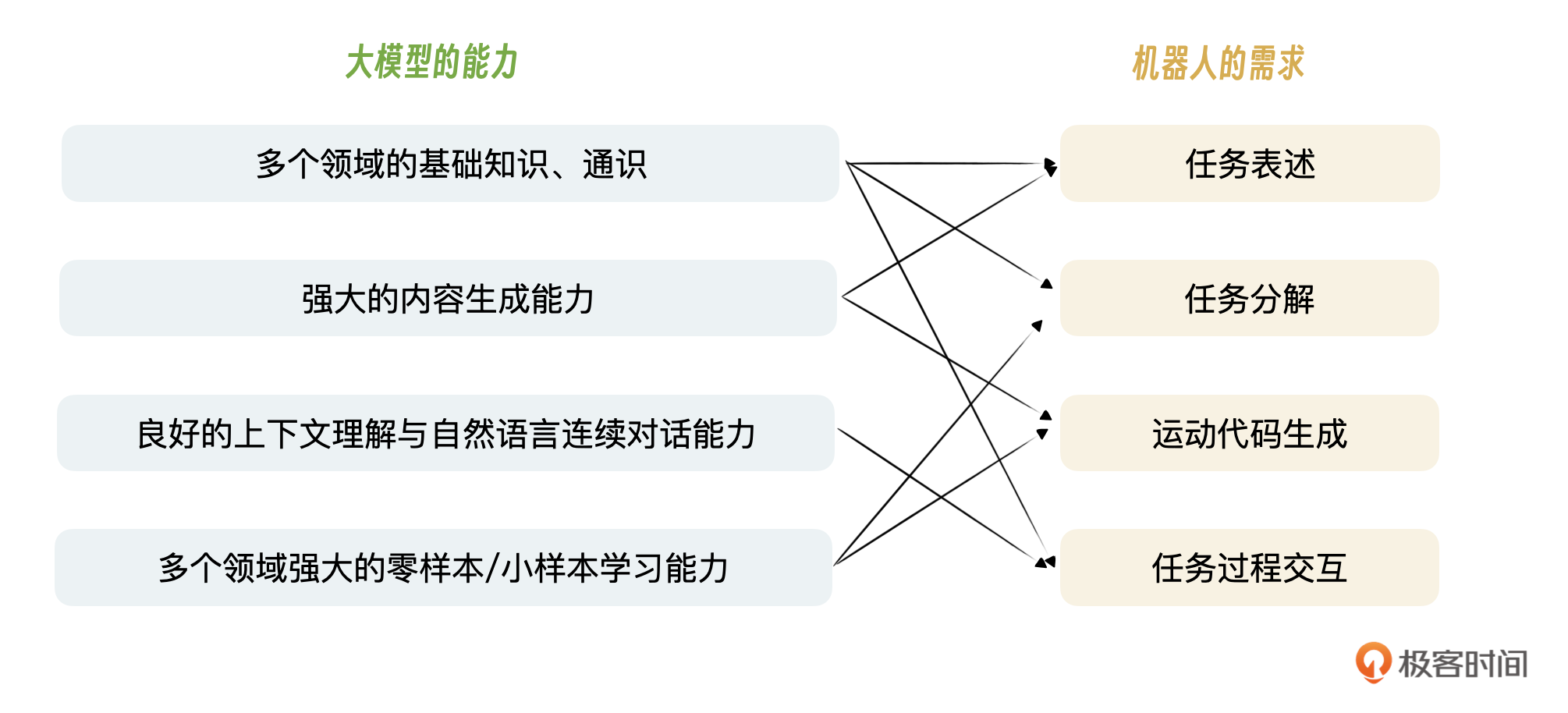
大模型强大的上下文理解能力,可以辅助机器人完成对所执行目标的理解,以及进行任务的拆解、规划。大模型强大的代码生成能力,可以快速生成各种语言的可执行代码。few-shot和zero-shot能力,使机器人能够在少量训练或者不训练的情况下,灵活地应对各种任务和指令,而不必为每个任务进行专门的训练。这让机器人在实际应用中更具通用性,能够处理多样化的场景和需求。
基于这几点思路,业界已经有了好几个成熟的方案,我们一起看一下。
技术框架
RT-2
RT-2就是Robotics Transformer-2,是谷歌DeepMind团队开发的一种结合大规模Transformer模型和强化学习的机器人技术。RT-2利用Transformer模型的强大学习能力和适应能力,使机器人在复杂任务中表现更加出色。RT-2建立在视觉-语言模型(VLM)的基础上,又创造了一种新的概念:视觉-语言-动作(VLA)模型,它可以从网络和机器人数据中进行学习,并将这些知识转化为机器人可以控制的通用指令。
Q-Transformer
Q-Transformer的核心思想是在Transformer模型的基础上,引入Q-learning等强化学习算法,用于处理时序决策任务。主要步骤包括:
- 数据输入:收集环境状态和动作数据,这些数据包括时序特征和上下文信息。
- 特征提取:通过Transformer编码器提取特征,捕捉状态之间的复杂依赖关系。
- Q值计算:结合强化学习算法,如Q-learning,通过预测不同动作的Q值,来评估每个动作的潜在收益。
- 策略优化:使用强化学习策略,选择最优动作,更新Q值,从而优化决策过程。
Q-Transformer可以用于优化机器人的路径规划和任务执行。通过学习环境中的状态变化,机器人可以更智能地选择行动路径,避免障碍物,提高任务完成效率。
当然还有AutoRT、SARA-RT、RT-Trajectory、RT-H等技术框架,这里我就不一一说了,感兴趣的话可以自己了解一下。
创业公司
Figure
ChatGPT一直被认为是一个聪明的大脑,直到投资Figure AI后,同时拥有了强大的身体。ChatGPT+FigureAI产生了最强大的人形机器人Figure 01。据FigureAI的官方说法,他们的目标是开发通用的类人机器人,为人类带来积极影响,为子孙后代创造更美好的生活。这些机器人可以消除对不安全和不受欢迎的工作需求——最终让我们过上更快乐、更有意义的生活。
1X
1X来自挪威,是1X Technologies的简称,1X是OpenAI投资的第一家硬件公司。其实1X的硬件说实话,在业界表现很普通,但是软件却很强,核心人员来自Google Brain、Deepmind等。加上OpenAI加持,号称是业界真正专注于大模型软件和机器人硬件结合的公司,将来最有可能发展为由ChatGPT控制的机器人。
除此之外,还有像Tesla的擎天柱、美国波士顿动力公司生产的Atlas等等。
机器人的发展障碍
生成任务的安全性
之前我看到过一个例子,有一个机器人在给厨房帮忙用蒸箱蒸馒头,蒸之前开蒸箱门往里面放是不需要考虑太多因素的,只要别发生碰撞即可。但是蒸好之后需要打开蒸箱拿出来的时候就需要考虑旁边是否有人,因为蒸箱打开的时候高温蒸汽喷出会对旁边的人造成烫伤,机器人是否能认识到这一点并在生成“打开刚刚使用过的蒸箱”任务动作时,考虑高温蒸汽对人的影响,没有人的话可以直接打开,有人走过来的话就要晚点开或者提醒人员离开一点,这就是基本的安全要求。
操作动作的安全性
在很多需要专业技能的领域,机器人还要关注细微工艺动作是否符合安全规范,譬如在机器人手术中,机器人生成的磨削骨头或者切割软组织的某个细微动作,是否符合手术手法要求,是否会对病人造成额外伤害,也是需要慎重考虑的问题。
缺乏高质量训练数据
像图像和自然语言处理领域,我们可以从网上获取大量训练数据,可是用于训练机器人学会执行新任务、新技能的高质量数据却非常匮乏,因为机器人执行任务时,面临的环境和交互内容模态更多,更加复杂,因此需要的数据集规模也比CV和NLP领域要大,目前业界最新的多模态大模型GPT-4虽然已经能动态地理解一些内容,但是对于需要执行各种复杂物理交互的机器人来讲,这只是基础要求。
当然除了这3点之外还有很多,比如执行速度、操作准确性,甚至伦理道德等问题,都是需要我们考量的。
小结
这节课我带你学习了大模型对机器人行业的赋能,大模型赋予了机器人强大的任务理解能力和代码生成能力,随着AI大模型技术的不断发展,机器人行业也会迎来春天,尤其是人形机器人,未来10~20年,肯定会有黑马杀出来。现在稍微领先一些的技术框架是 RT-2 和 Q-Transformer。如果你感兴趣的话,可以选择自己喜欢的技术框架和公司深入了解一下。
思考题
畅想一下,当人形机器人行业发展成熟后,可以为我们的生活带来什么变化?欢迎你把想法打在评论区,和我一起讨论!如果你觉得这节课的对你有帮助的话,也欢迎你分享给其他朋友,我们下节课再见!
- 石云升 👍(1) 💬(2)
总感觉目前的人形机器人缺少人味,做不到真正的陪伴。但如果用在工业,消防等危险领域到是很好。另外就是机器人不一定是人形的,这类硬件+AI的场景反倒是有很多机会。
2024-09-08