19 LLaMA 3 具身智能体的无限潜能
你好,我是 Tyler!
今天是我们这一季专栏的最后一节课!作为本季的收官之作,不妨让我们大胆预测一下未来的技术趋势。虽然说是预测,但这些趋势已经在当下逐步显现。在上一节课中,我们探讨了 LLaMA 3.2 Vision 多模态模型的特性及其实际应用,这背后揭示了一个重要趋势:大模型技术正在从语言单一锚点逐步扩展到多模态与空间智能,更进一步延伸到动作智能(Action Intelligence)。
为什么说“换锚”是大势所趋?
理解这一点,我们需要从当前大模型技术的发展瓶颈谈起。过去几年,训练大语言模型(LLM)的关键路径是通过不断扩展数据量和模型参数来提升性能。然而,如今这条路径正在遇到两个实际限制。
首先,高质量语言数据的上限,训练大模型需要大量高质量的文本数据,如学术论文、书籍、新闻等。这些数据的“富矿”已经被大规模开发,进一步倍增数据量变得困难。
此外,Token 增长的边际收益递减,即便能继续扩大数据规模,模型性能的提升也在趋缓,逐步呈现边际收益递减的趋势。这种情况让构建具身智能(Embodied Intelligence)或通用人工智能(AGI)的愿景显得更加遥远。
面对这个瓶颈,我们有两个可能的解决办法。
方法一:继续依靠合成数据
这一策略的核心是通过生成器模型扩展训练数据,比如利用现有语言数据生成更多样的合成数据。这种方法可以延续当前的路径,但问题在于:
- 合成数据的质量和真实性可能不足,容易引入偏差。
- 对突破数据规模限制的帮助有限,只能暂时缓解瓶颈。
方法二:“换船”——转向多模态与空间智能
相比依赖语言单模态,这种方法更具潜力。通过引入多模态数据,如图像、视频、音频、甚至 3D 空间数据,模型可以具备更加全面的感知能力。比如:
- LLaMA 3.2 Vision 已经结合视觉和语言输入,可以理解复杂的图文关系。
- 这类模型让智能系统在现实场景中的应用能力显著增强,比如在自动驾驶、AR/VR 和智能机器人等领域。
这种转向不仅扩展了模型的输入维度,还为大模型打开了全新的能力边界,能更好地构建对现实世界的全面理解。
总结来说,“换锚”是大模型技术发展的必然趋势。从单一语言模型转向多模态和空间智能,不仅是应对数据瓶颈的必要选择,也是构建下一代智能系统的关键路径。
什么是 VLA 模型?
VLA(Vision-Language-Action Model,即视觉-语言-动作模型) 是当前技术发展的前沿领域。它的核心目标是结合视觉、语言与动作模态,打造具备综合感知、语言推理以及行动能力的智能体。
VLA 模型不仅需要感知和理解(Vision 和 Language),还需要能够基于多模态信息完成物理交互(Action)。例如,现实场景理解和动态任务执行。
- 现实场景理解
VLA模型通过视觉捕捉场景信息,用语言进行描述或回答问题。例如,它可以在图像中识别物体、理解其语义关系并生成符合上下文的回应。这种能力使其能够处理多模态输入,在指令跟随任务等具身智能应用中表现出色。
- 动态任务执行
VLA模型具有执行复杂任务的能力,比如物体抓取、工具操作,甚至在虚拟或物理环境中完成一系列连续动作。它依赖于视觉编码器(视觉感知)、语言编码器(语言理解)和动作解码器(任务执行)的协同工作,形成从感知到行动的完整链路。
- 多模态数据融合
通过整合视觉、语言和动作三大模态,VLA模型展现出比单一模态模型更强的场景推理和任务泛化能力。这种“端到端”多模态融合方式被认为是下一代智能系统的关键架构,特别是在需要跨模态协作的复杂场景中表现出色。
- 自动驾驶领域的突破
VLA模型在自动驾驶领域得到了突破性应用。例如,谷歌 Waymo 推出的多模态自动驾驶模型 EMMA,基于 VLA 技术实现了对动态交通场景的理解和实时决策。这标志着 VLA 模型的多模态能力正在改变智能驾驶技术的未来。
- 机器人控制中的潜力
早期的 VLA 模型已在机器人控制领域展现出巨大潜力。由谷歌 DeepMind 推出的机器人控制系统,利用 VLA 技术完成了如物体操作、路径规划等复杂任务,证明了其在自动化操作中的应用价值。
- 3D-VLA模型的扩展
3D-VLA模型 是 VLA 技术的高级版本,它通过整合三维空间信息,增强了模型在三维场景推理与动作规划中的能力。相比于传统的二维视觉语言模型,3D-VLA 能更好地理解物理世界,为机器人导航、虚拟现实(VR)和增强现实(AR)等领域提供了强大的技术支持。
VLA模型是多模态技术发展的重要里程碑。通过整合视觉、语言和动作模态,它突破了单模态模型的局限性,实现了从感知到执行的跨模态闭环能力。这种技术不仅扩展了模型的应用场景,还为智能体在复杂环境中的全面理解与交互提供了技术支撑。无论是自动驾驶、机器人控制,还是三维场景推理,VLA 模型正在推动智能系统向着更高效、更智能的方向演进,成为未来人工智能发展的重要基石。
OpenVLA:开源的视觉-语言-动作模型
OpenVLA 是一项多模态人工智能领域的重要突破。它是一个开源的 视觉-语言-动作模型(Vision-Language-Action Model, VLA),拥有 70 亿参数,结合了 LLaMA 2 的强大语言处理能力和先进的视觉编码器,实现了视觉数据与语言信息之间的高效交互。这种融合使得模型能够感知、理解和执行任务,为构建智能体提供了完整的功能链路。
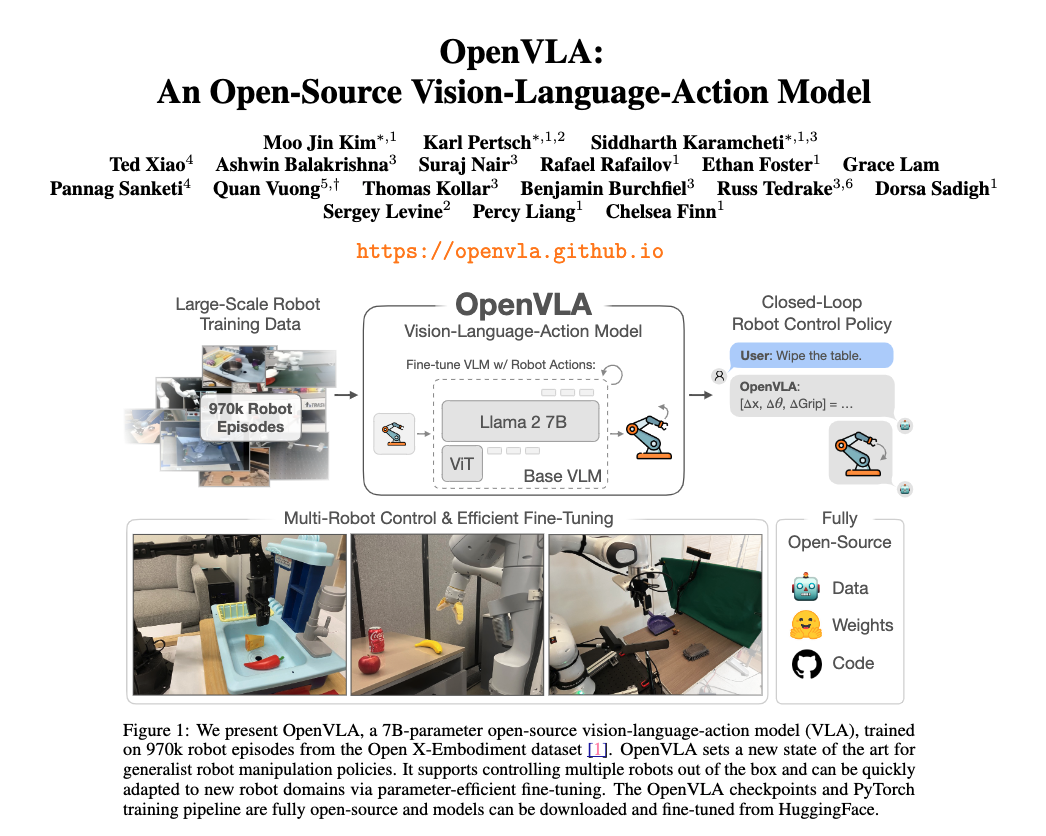
主要特点
- 参数规模与模型基础:OpenVLA 基于 LLaMA 2 进行了微调,拥有 70 亿参数,是一个专为多模态任务设计的强大模型。它不仅继承了 LLaMA 2 的语言理解能力,还通过引入视觉编码器增强了视觉与语言模态的协同处理能力。
-
视觉与语言的高效结合:OpenVLA 在视觉数据和语言之间建立了深度联系。例如,它可以:
-
分析图像并生成相关的文本描述。
- 通过语言指令,识别图像中的目标并完成任务规划。
- 在复杂场景中通过多模态数据(如图像和文字)进行推理和决策。
- 动作生成能力:除了视觉和语言理解,OpenVLA 还具备动作规划和执行能力。这让它可以直接应用于机器人控制、虚拟环境操作等需要物理交互的场景。
- 开源性与可扩展性:OpenVLA 的开源特性使其脱颖而出。研究人员和开发人员可以轻松访问模型,构建自己的多模态解决方案。这种开放性加速了技术的传播和应用,使 OpenVLA 成为推动多模态人工智能发展的重要工具。
技术实现示例
以下是一个使用 OpenVLA 进行动作预测和执行的 Python 示例代码:
from transformers import AutoModelForVision2Seq, AutoProcessor
from PIL import Image
import torch
# 加载 OpenVLA 模型和处理器
processor = AutoProcessor.from_pretrained("openvla/openvla-7b", trust_remote_code=True)
vla = AutoModelForVision2Seq.from_pretrained(
"openvla/openvla-7b",
attn_implementation="flash_attention_2", # [可选] 使用高效注意力机制
torch_dtype=torch.bfloat16,
low_cpu_mem_usage=True,
trust_remote_code=True
).to("cuda:0")
# 输入图像与指令
image = get_from_camera() # 获取实际图像
prompt = "In: What action should the robot take to {<INSTRUCTION>}?\nOut:"
# 执行预测
inputs = processor(prompt, image).to("cuda:0", dtype=torch.bfloat16)
action = vla.predict_action(**inputs, unnorm_key="bridge_orig", do_sample=False)
# 生成动作并执行
robot.act(action)
这个示例展示了 OpenVLA 如何将视觉信息与语言指令结合,并生成适合当前场景的动作决策。
OpenVLA 作为一个开源视觉-语言-动作模型,体现了人工智能领域多模态技术的最新进展。通过整合 LLaMA 2 的语言处理能力与先进的视觉编码器,OpenVLA 为多模态理解和任务执行提供了创新性的解决方案。它的开源性和强大的多模态能力,使其成为研究人员和开发者关注的焦点,也是推动智能体技术发展的关键平台。
总结
学到这里,本季的内容即将告一段落。在这个快速变化的时代,大模型技术正以惊人的速度向前发展。这一领域的进步不仅延续了我们在第一季中提到的几个关键趋势,还在持续深化,逐渐进入技术和应用的深水区。希望你能够保持关注,跟上这些前沿技术的步伐。
首先,RAG(Retrieval-Augmented Generation)和AI搜索已经成为技术创新的重要方向。通过结合检索与生成能力,这些技术正在重新定义信息获取和处理的方式,使得复杂问题的解答和精准信息的提供更加高效,知识驱动的AI正在迈向更具智能化的阶段。
其次,多步推理技术以及其他后推理技术正在逐步攻克超级复杂的问题。这些技术使得模型可以在信息不完全、问题条件多变的情况下,动态调整解题策略,展现出更接近人类思维的推理能力。这不仅推动了AI应用的广度和深度,还为解决跨学科、跨领域的问题提供了可能性。
最后,多模态技术的进展令人瞩目。它已经不再局限于虚拟空间的应用,在本节课中,它进一步扩展到了物理空间,涵盖机器人控制、虚拟与现实交互等多个领域。这标志着AI技术正在从信息处理走向实际物理场景的全面赋能,将为工业自动化、智能家居、医疗等行业带来深远的影响。
这些趋势无疑都是令人振奋的,但同时也对技术开发者和研究人员提出了更高的要求。希望每一位关注和学习这些技术的朋友,都能抓住时代的机遇,深入理解这些前沿技术的本质,不断提升自己的能力,不掉队,不迷失。更多的心里话留在结束语中,我们在那接着聊。
- 张开元 👍(0) 💬(0)
换到大世界模型的赛道
2024-11-26